
Introduction
Recently a National Academy of Sciences expert panel has reviewed the human health risks from methyl mercury in fish. Specifically, they reviewed three epidemiological studies on children prenatally exposed to methyl mercury (MeHg) in seafood. One study is located in the Faeroe Islands in the North Atlantic on a population whose exposure to MeHg is from consumption of fish and pilot whale meat. A second study, completed over 15 years ago, was located in New Zealand on people largely consuming ocean fish. The third study is located in the Seychelles Islands in the Indian Ocean where MeHg exposure comes from consumption of fish and barracuda.
All three studies included hair levels as one measure of the body burden of MeHg. All three studies used the average hair levels during pregnancy in their regression analyses comparing mercury levels in the mother with developmental measures in the children. Two studies, the Faeroes and New Zealand found adverse effects on child development whereas the Rochester study in the Seychelles did not. There it was found that the children were developing well with no evidence of any adverse effect from MeHg.
Results from these studies are relevant for the US and other countries with similar dietary intakes of fish. The average levels of MeHg in the fish are similar to those found in the US market. However, average mercury intake amounts are 10 to 20 times higher than in the US because these populations consume more fish, not because they eat a few fish with abnormally high MeHg levels. Thus, any potential adverse effects of MeHg in fish should be detected in these populations long before such effects would be seen in the US. One explanation for the discrepancy in the outcome of these studies is that average hair levels may underestimate the maximum or peak levels during pregnancy. Thus a number of fish meals taken close together might give a peak level that would be smoothed out by taking the nine month average during pregnancy. Indeed, there is evidence that in the New Zealand study the peak level was, on the average, 50% higher than the average level. This could have considerable impact in risk assessment.
For these reasons the National Academy of Sciences committee recommended that hair analysis be repeated on the samples already collected to determine peak levels. Hair grows at an average rate of about one centimeter per month. To obtain a true peak value the maximum length of hair per analysis should not be more than 1.5 centimeter (corresponding to the biological half-life of 45 days for MeHg in the human body). Preferably a length of the hair sample analyzed should be about 0.2 cm, corresponding to about 6 days of growth, as methyl mercury may take up to six days to completely distribute to all tissues in the body.
Single strand analysis of hair was investigated at Rochester using a conventional x-ray fluorescence analyzer. However, it could only detect mercury levels in hair down to 20 ppm. Since the average hair levels in many of these populations is 4 to 7 ppm a more sensitive instrument is needed to quantify Hg ariability of the length scale of these hairs with high spatial resolution. This need is met by the X26A hard x-ray microprobe at the National Synchrotron Light Source. The results of the X26A Hg determinations will be used as critical data for interpreting the overall results of the two studies and could help in resolving the differences in the conclusions of the three studies mentioned.
Experimental Methods
The x-ray microprobe at NSLS beam line X26A was used for scanning individual hairs from subjects involved in the Seychelles and Faeroe Island studies. The individual strands of hair were mounted in a special Plexiglass holder that held the strands taut, each holder accommodating between 4 to 5 single strands. A monoenergetic beam of 12.39 keV was used for the analyses, tuned using a Si(111) channel-cut monochromator. Kirkpatrick-Baez type focusing mirrors were used to produce a final beam size of about 10 µm in both vertical and horizontal dimensions. Fluorescence counts for the trace elements of interest were measured using a Canberra SL30165 Si(Li) detector. Typical x-ray energy spectra obtained for the Seychelles and Faeroe Island hairs are displayed in Figure 1. Elemental abundances were calculated based on calibration against National Institute for Environmental Studies Certified Reference Material No. 5 Human Hair, which has a certified Hg abundance of 4 ppm by weight. We estimate that the minimum detection limit for Hg determination is about 1 ppm for a 5-minute data acquisition period. That is sufficient for detection of the Hg levels found in the subject hair samples, which typically exceed 3 ppm. The data were normalized to the number of Compton and Rayleigh scattering events to account for variations in hair diameter and density as a scan was made over the hair. Most of the data were acquired by acquisition of full energy spectra at each point. Scans were made along the individual hair samples at 0.5 mm intervals. Assuming a growth rate for hair of about 11 mm/month, this corresponds to a 1.4-day interval between points. Repetitive measurements on a single point and repetitive scans over a specific region were made to show that consistent reproducible results could be obtained.

Figure 1. Typical x-ray fluorescence spectra obtained fromsingle strands of hair from Seychelles and Faeroe Island subjectsusing the X26A hard x-ray microprobe. The spectra obtainedare nearly identical. The elements giving rise to theobserved peaks are identified in the figure.The Hg L α x-ray iswell separated from the Zn Kß x-ray. The peaks at about 12keV x-ray energy are from Raleigh and Compton scattering.
Results and Conclusions
In order to further validate the experimental approach, a hair sample taken from a volunteer who had ingested known quantities of MeHg containing shark in 17 meals eaten over a period of 7 months was measured. An earlier measurement had been made with a standard x-ray fluorescence instrument in steps of 2 mm. The results, together with points calculated for the Hg concentration based on a one-compartment model, are shown in Figure 2. The results obtained for another hair from the same subject measured with the x-ray microprobe are shown in Figure 3. The higher spatial resolution reveals additional structure in the Hg distribution along the hair. Several scans were made with generally good reproducibility, as is shown in Figure 3.
Figure 2. Measured and predicted mercury levels in hair following shark consumption over a several month period by a volunteer. Measurements were made on a sample containing multiple hairs with a conventional XRF analyzer. A simple one-compartment model was used to predict the uptake of Hg in the hair. The line marked”WHO safe limit” shows the value assigned by the World Health Organization as the maximum safe concentration for MeHg in hair.
These scans were taken at different times and do not necessarily investigate the composition of the same points on the hair. Hg concentrations found in scans over the length of hairs obtained from three subjects in the Seychelles Islands group. The time period covered in the measurement is approximately one year. In addition, results for Zn concentrations are also included. It can be seen that there is a close correspondence in the peak locations for Hg and Zn showing that the peaks do not result from statistical uncertainties in the measured number of counts for the two elements.
Our results show fine scale variability in the measurements on the control specimen (Figure 2) and from the study subjects that may reflect differences in Hg exposure from variable blood concentrations, varying hair density along the strand, or metabolic changes in the subjects. We believe that the normalization procedure and reproducibility checks rule out effects from variable hair density or other experimental problems. Thus, the fluctuations observed for Hg and other elements such as Ca, Zn, and Fe suggest that the cause could be, in part, a metabolic effect rather than solely a variation in elemental concentrations in the blood as it seems unlikely that blood concentrations of several elements would simultaneously increase or decrease in the same way. Because the results were based on single hair strands, one must also consider whether temporal changes in hair growth rates may affect trace element incorporation in general.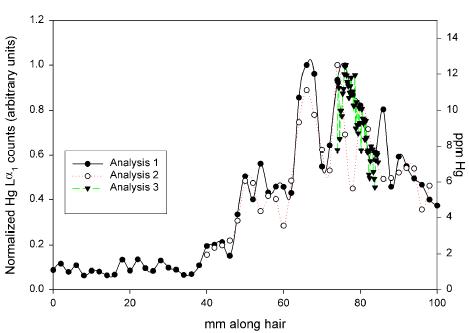
Figure 3. Measured Hg concentration in a single strand of hair taken from the volunteer subject following ingestion of Hg-containing shark using the X26A hard x-ray microprobe. Results of three scans taken at different times show the reproducibility of the fine structure observed with the greater spatial (temporal) resolution made possible by the use of the synchrotron x-ray source.
On the other hand, it was shown (Figures 2 and 3) that there is excellent correlation with the Hg intake in the test volunteer. The methodology used therefore seems highly useful to explore the validity of the hair mercury concentration as an exposure biomarker and indicator of individual risk of MeHg toxicity. Hence, it is plausible to argue that the uptake of Hg in target organs, in addition to hair, could well be subject to short term peak absorption rates that depend both on metabolism and on blood concentrations.